

The ground-truth data layer for robotics.
Partnered with leading robotics and AI teams.
We're building hardware and software for high-fidelity robotics data.
The hardware acquires at scale. The software closes the loop, so every dataset makes the next one better.
Tactile as ground truth.
No ambiguity
Touch or no touch, grip or release, the signal says which, every time.
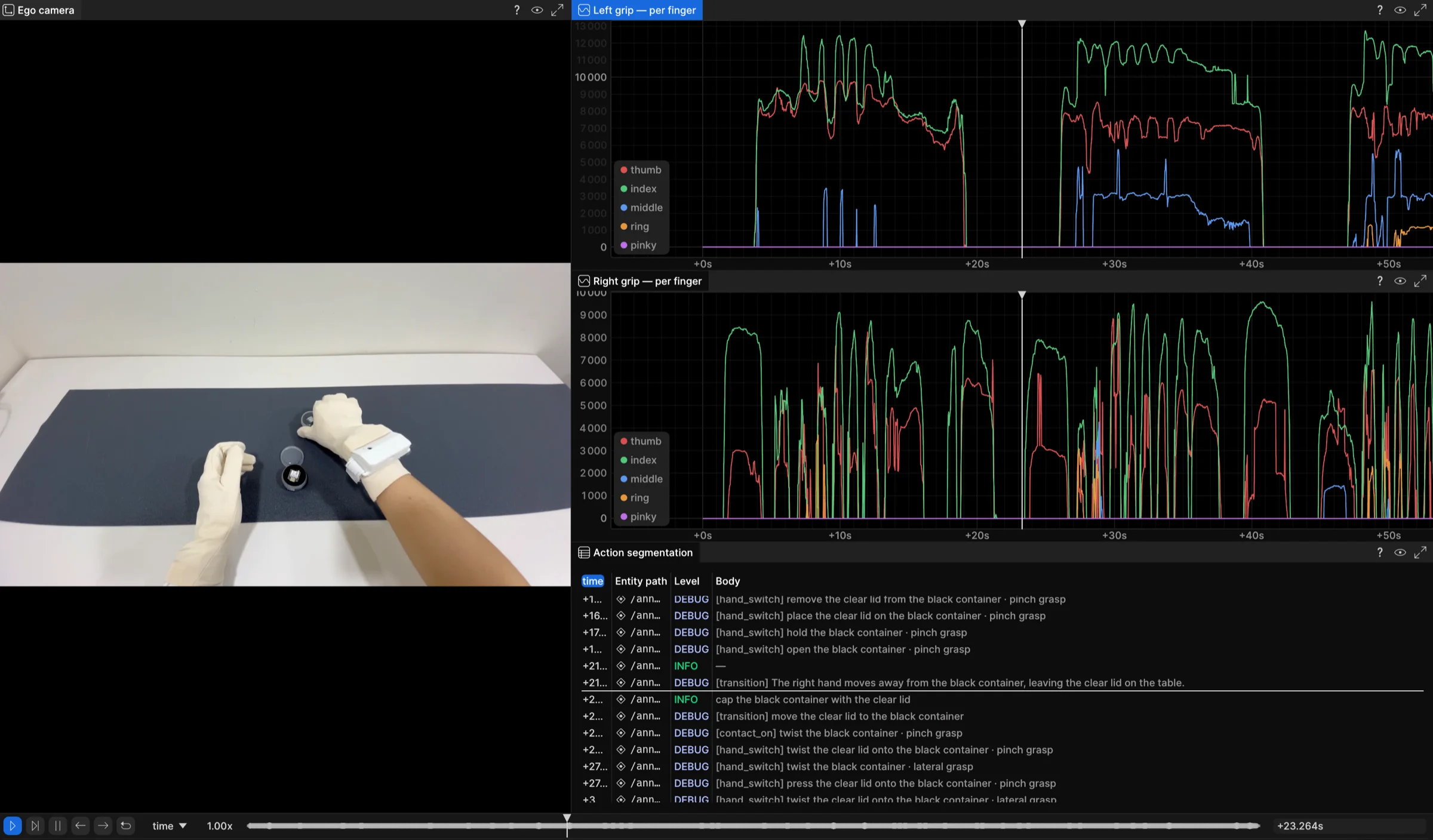
Contact dynamics
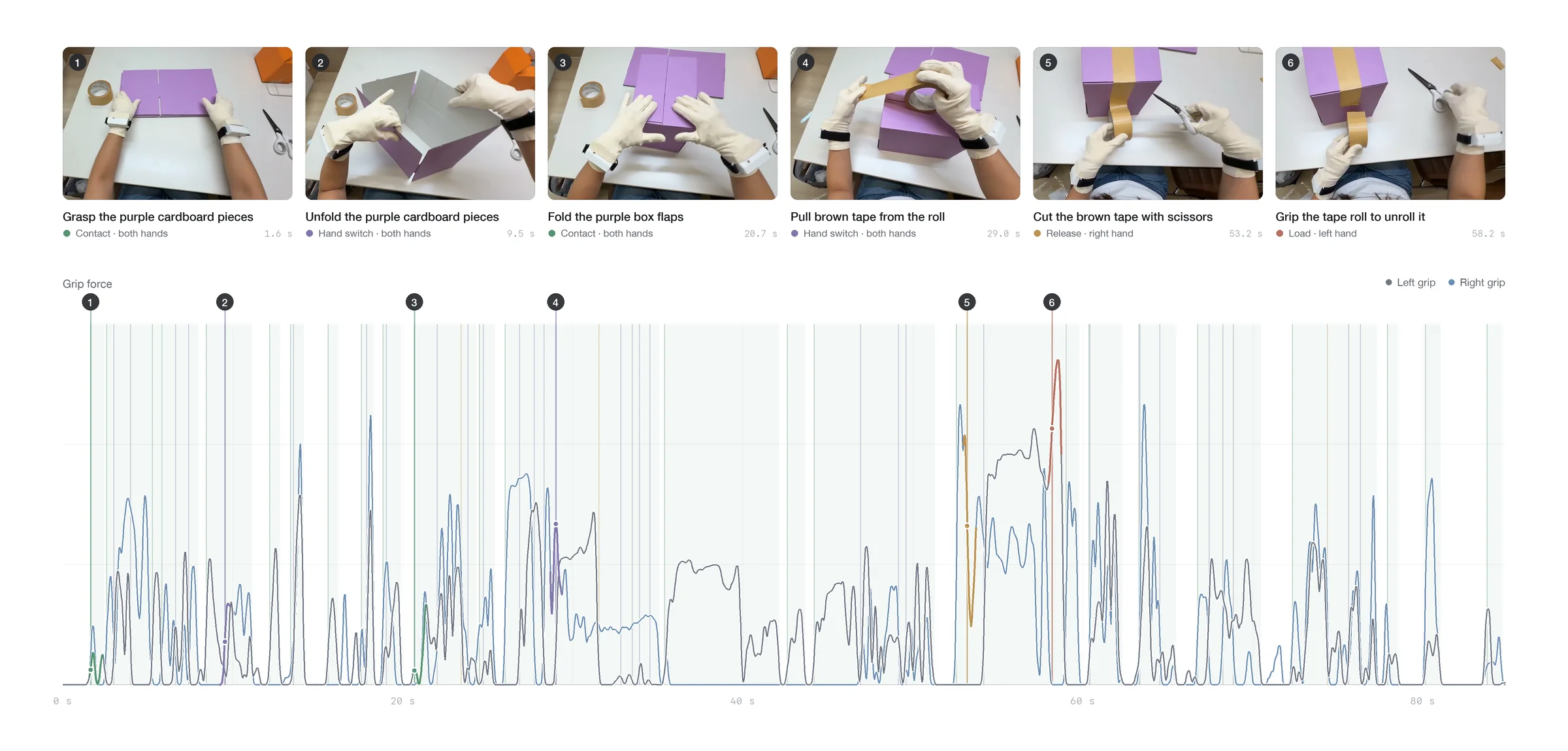
Continuous force through every phase of manipulation: grasp, hold, adjust, release.
Tactile-grounded annotation
Contact transitions define action boundaries, grounding each action in measurement.
No ambiguity
Touch or no touch, grip or release, the signal says which, every time.
Contact dynamics
Continuous force through every phase of manipulation: grasp, hold, adjust, release.
Tactile-grounded annotation
Contact transitions define action boundaries, grounding each action in measurement.
Synchronize any hardware, any sensors.
Vision, audio, tactile, IMU — every stream locks to one shared clock at sub-millisecond precision. Feeds that arrive drifting snap onto a single timeline, so the whole episode reads as one coherent record instead of files you reconcile later.
Hardware-level control.
We built the entire stack in-house, from the sensor up — because data quality can only be guaranteed when you understand and control the system from first principles.